

为了这玩意blhx-auto-project我需要做一个图像匹配的玩意,一路顺藤摸瓜摸到了RANSAC+SIFT,这里研究一下。
相关资料:
Wikipedia:scale-invariant feature transform (SIFT)
Wikipedia:Random sample consensus (RANSAC)
Github:RobHess的源码(SIFT+RANSAC)(C++)
博客:RobHess的SIFT源码分析:综述
博客:RANSAC算法详解
博客:利用RANSAC算法筛选SIFT特征匹配
scikit-image:Robust matching using RANSAC(Python)
发现我绕远了
opencv上有相关Demo
github上还有图片拼接的相关代码
基本上没我啥事了
原理研究:
Python实现:
使用opencv来实现。
import numpy as np
import cv2
class Object_detect(object):
def __init__(self):
self.ratio=0.85
self.MIN_MATCH_COUNT=5
self.sift = cv2.xfeatures2d.SIFT_create()
self.index_params = dict(algorithm = 0, trees = 5) # FLANN_INDEX_KDTREE = 0
self.search_params = dict(checks=50) # or pass empty dictionary
self.flann = cv2.FlannBasedMatcher(self.index_params, self.search_params)
self.debug_flag=False
def pre_detect(self,obj):
obj.kp, obj.des=self.sift.detectAndCompute(obj.img, None)
return obj.kp, obj.des
def show_img(self,img):
cv2.imshow('kp',img)
cv2.waitKey(100000)
cv2.destroyAllWindows()
def show_keypoints(self,img,kp):
img=cv2.drawKeypoints(img,kp,None)
self.show_img(img)
def show_matches(self,img1,kp1,img2,kp2,matches,**kw_args):
img_with_matches = cv2.drawMatches(img1, kp1, img2, kp2, matches, None, flags=2, **kw_args)
self.show_img(img_with_matches)
def sift_detect(self, obj1, obj2):
# find the keypoints and descriptors with SIFT
kp1, des1 = (obj1.kp, obj1.des) if obj1.kp is not None else self.pre_detect(obj1)
kp2, des2 = (obj2.kp, obj2.des) if obj2.kp is not None else self.pre_detect(obj2)
# Show keyPoints in each picture
if self.debug_flag:
self.show_keypoints(obj1.img,kp1)
self.show_keypoints(obj2.img,kp2)
# Use knn match where k=2
matches = self.flann.knnMatch(des1,des2,k=2)
# Apply ratio test
good_matches=[]
for m1, m2 in matches:
if m1.distance < self.ratio * m2.distance:
good_matches.append(m1)
# show matches
if self.debug_flag:
if good_matches:
print('(good num / kp1 num) = (%d / %d) = %.2f'%(len(good_matches),len(kp1),len(good_matches)/len(kp1)))
self.show_matches(obj1.img,kp1,obj2.img,kp2,good_matches)
else:
print("no good matches")
if len(good_matches)=len(kp1)//3): return None, len(good_matches)/len(kp1)
queryPoss = np.float32([ kp1[m.queryIdx].pt for m in good_matches ]).reshape(-1,1,2)
trainPoss = np.float32([ kp2[m.trainIdx].pt for m in good_matches ]).reshape(-1,1,2)
transMat, mask = cv2.findHomography(queryPoss, trainPoss, cv2.RANSAC,5.0)
matchesMask = mask.ravel().tolist()
# check whether there is enough matched points
if sum(matchesMask)<4 or sum(matchesMask)/len(kp1)<0.3: return None, sum(matchesMask)/len(kp1)
# 映射中心
height1, width1 = obj1.img.shape[:2]
src_center_pos = np.float32([width1/2,height1/2]).reshape(-1,1,2)
dst_center_pos = cv2.perspectiveTransform(src_center_pos,transMat) # 转化中心
dst_center_pos_tuple=tuple(np.squeeze(np.int32(dst_center_pos),(0,1)).tolist())
# show matches and position
if self.debug_flag:
# 映射边框
src_edge_poss = np.float32([ [0,0],[0,height1-1],[width1-1,height1-1],[width1-1,0] ]).reshape(-1,1,2)
dst_edge_poss = cv2.perspectiveTransform(src_edge_poss,transMat) # 转化边框
img2 = cv2.polylines(obj2.img,[np.int32(dst_edge_poss)],True,255,3, cv2.LINE_AA)
img2 = cv2.circle(img2,dst_center_pos_tuple,5,(0,0,255),-1,cv2.LINE_AA)
self.show_matches(obj1.img,kp1,obj2.img,kp2,good_matches,matchesMask=matchesMask)
return (dst_center_pos_tuple[1],dst_center_pos_tuple[0]), sum(matchesMask)/len(kp1)
if __name__=='__main__':
class Obj(object):
def __init__(self,img,kp=None,des=None):
self.img=img
self.kp=kp
self.des=des
def remove_alpha(img):
if len(img.shape)==3 and img.shape[2]==4:
return np.delete(img,3,2)
else:
return img
obj_dect=Object_detect()
obj_dect.debug_flag=True
from skimage import io
img1=cv2.imread('query.PNG')
img1=remove_alpha(img1)
img2=cv2.imread('train.PNG')
img2=remove_alpha(img2)
print('shape',img1.shape,img2.shape)
obj1=Obj(img1)
obj2=Obj(img2)
obj_dect.pre_detect(obj1)
obj_dect.pre_detect(obj2)
pos,score=obj_dect.sift_detect(obj1,obj2)
print(pos,score)
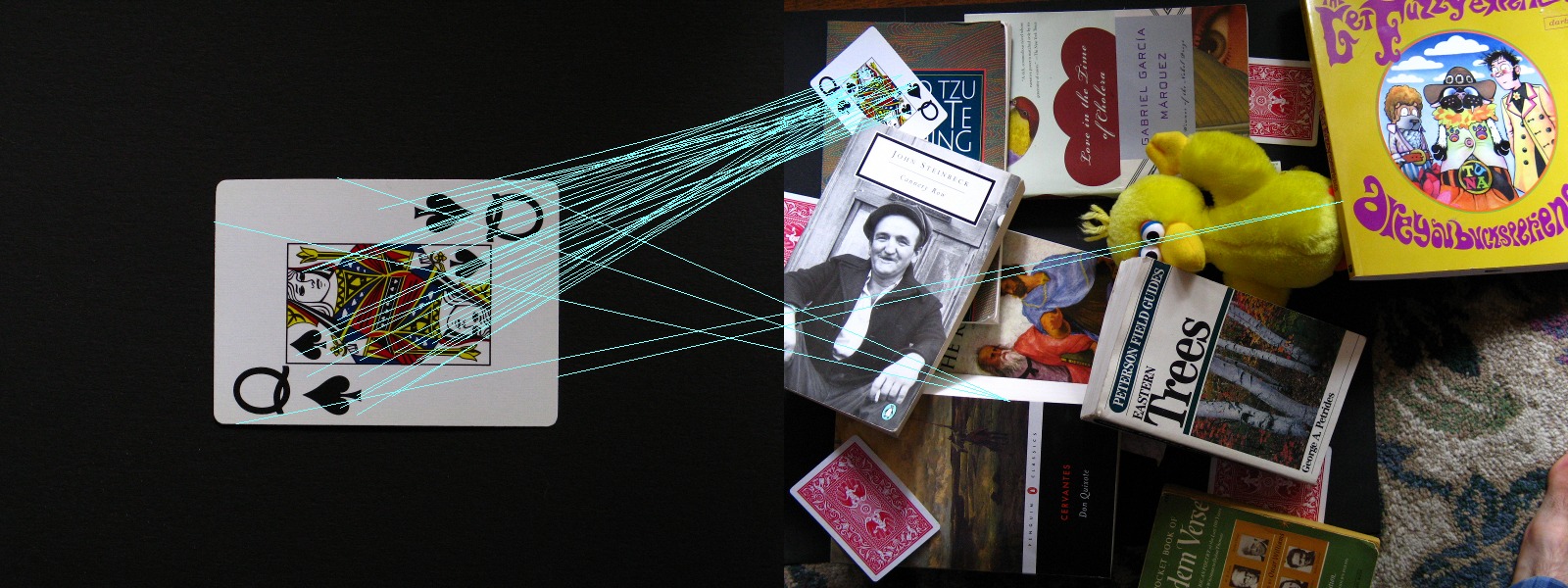
结果:
结果jio本还是不能流畅work,有一些bug:
1. 误检测,两个不同颜色按钮上的相同文字竟然能匹配上,考虑挺高准确率的threshold或者自己再匹配的基础上加一层颜色差异检测
2. 小物体检测不到,map上的小物件(40*40px以下)本身特征点数量就少,考虑降低
准确率的threshold(跟上一条冲突,但也不能为每个object单独设置threshold,很难受)